技术巡猎 极氪 无图导航方法、装置、电子设备和计算机可读存储介质无图导航这个方向,最容易被误解成“不用地图也能随便开”。其实它要处理的问题更为具体:在地下车库、半室内环境、特殊场地这些地方,车可能没有可用的导航地图。没有地图,不代表车周环境完全不可理解;但系统必须临时把眼前道路、路口和可行方向组织出来,否则车辆就只是在看见障碍物,却不知道该往哪里走。
极氪专利处理的就是这个问题。方法先根据车辆实时采集到的周边环境信息,构建车辆坐标系下由道路和路口组成的环境地图。然后在这个环境地图里标注导航信息,包括道路中心线、路口范围框,以及距离车辆行驶方向最近的目标路口的路口连接线。
这个思路可以理解为,车在没有全局地图时,先给自己画一张局部路网草图。
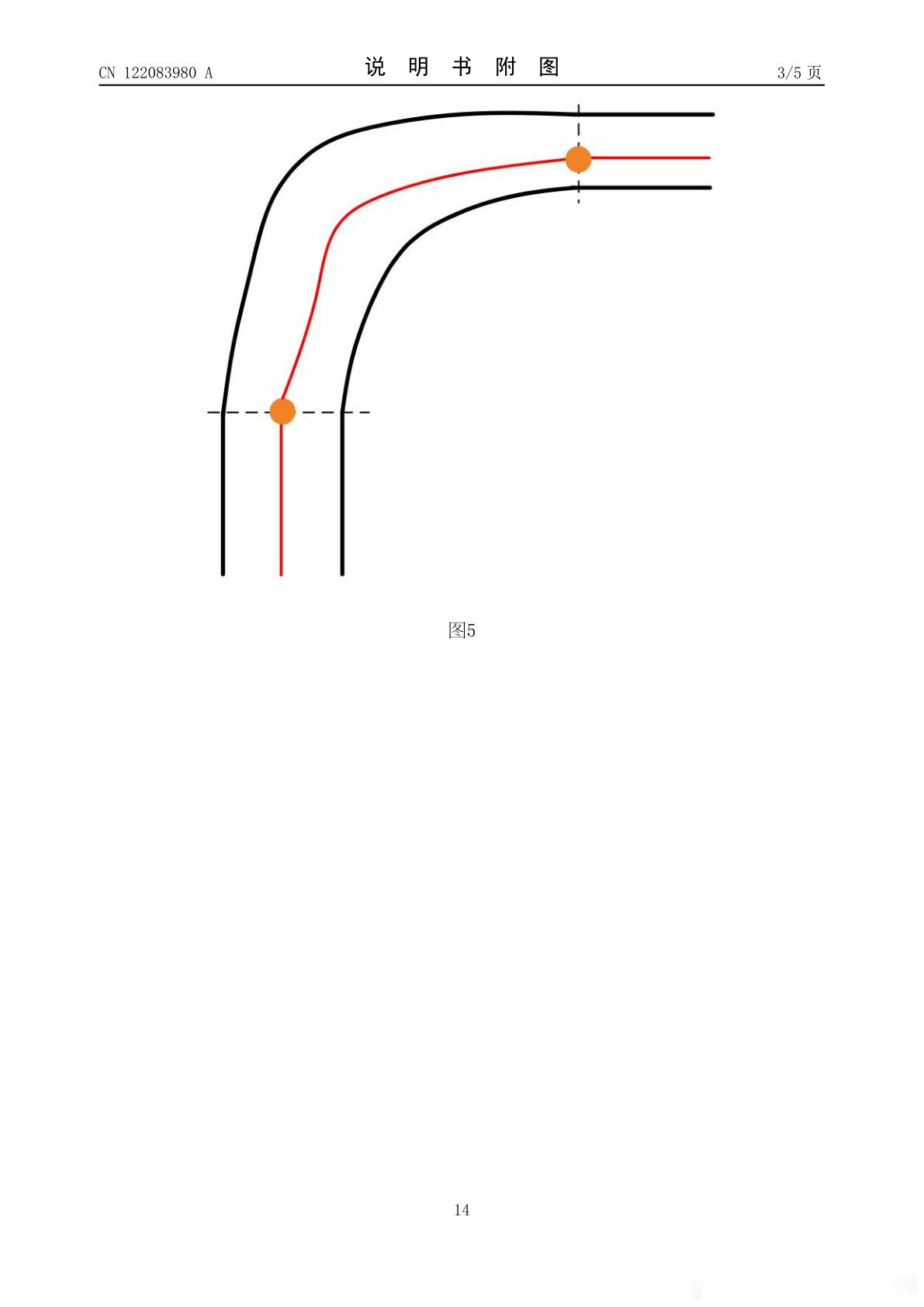
关键不是“识别到一条路”,而是要把路和路口之间的关系标出来。系统会根据车辆坐标系原点确定当前道路,沿车辆行驶方向标注当前道路中心线,直到中心线和最近路口范围框相连;再获取与最近路口相连的其它道路,从路口范围框开始往其它道路方向标注中心线。
有了路口连接线,车才知道当前道路和下一条道路怎么连起来。
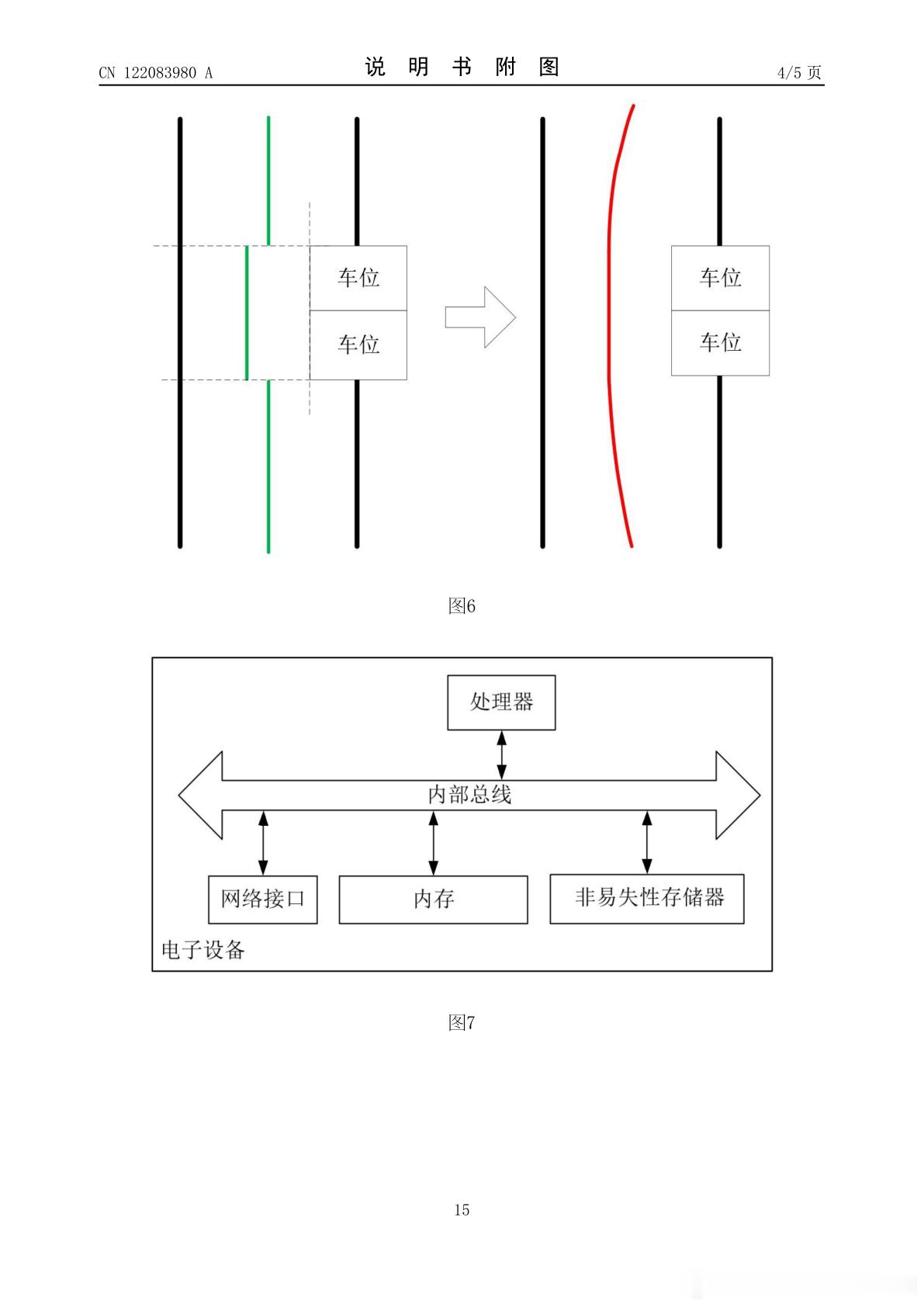
专利里还写了几种复杂情况。曲线道路要把曲线路段和直线路段分段,分别标注曲线中心线和直线中心线,再连接起来。两侧不对称的道路,要标注若干不连续中心线,再做平滑连接。相邻两个路口的范围框如果重叠,则合并成一个覆盖该区域的范围框。
这些细节说明,它不是在做简单的“看见车道线就走”。
地下车库和半室内场景里,道路边界经常不完整,路口形状也不标准,车道线可能弱、断、脏,甚至压根没有传统意义上的道路标线。系统如果只依赖一条线,很容易在路口处迷糊。它需要构建的是局部道路拓扑:当前在哪条路,前面路口在哪里,哪些方向能接出去。
这和普通导航的差别很大。普通导航通常先有一张稳定地图,车辆只是在地图上定位;无图导航则反过来,它必须先根据眼前感知生成一张临时可用的环境地图,再在这张地图上标注可行进方向。也就是说,导航信息不是提前存在的,而是车辆在现场组织出来的。
所以道路中心线、路口范围框、连接线这些元素并不只是绘图符号。中心线决定车辆沿哪里走,范围框决定系统如何理解路口区域,连接线决定当前道路和下一条道路怎么过渡。如果这三者关系乱了,车可能知道前方有路,却不知道该怎样穿过路口。
无图导航的价值不是让车突然拥有魔法,而是让车辆在没有高清地图或导航地图的地方,仍然有一套可参考的行进方向。
这一步做得越好,智驾从“依赖已有地图”走向“理解眼前道路”的空间就越大。