技术巡猎 蔚来 全主动悬架控制方法、电子设备和存储介质。全主动悬架不能只理解成“更软”或者“更硬”的事情。车遇到路面起伏时,到底是在冲击发生之后再补救,还是提前知道前方路面长什么样,然后先把车身运动安排好呢?传统被动悬架和半主动悬架,多数是在路面冲击已经发生后,通过传感器检测车身状态,再调节阻尼力来抑制振动。这个逻辑当然有用,但它天然是事后响应。车已经被路面顶了一下,再去压住车身动作,平顺性的上限就会受影响。
这份蔚来专利讲的是全主动悬架控制方法。
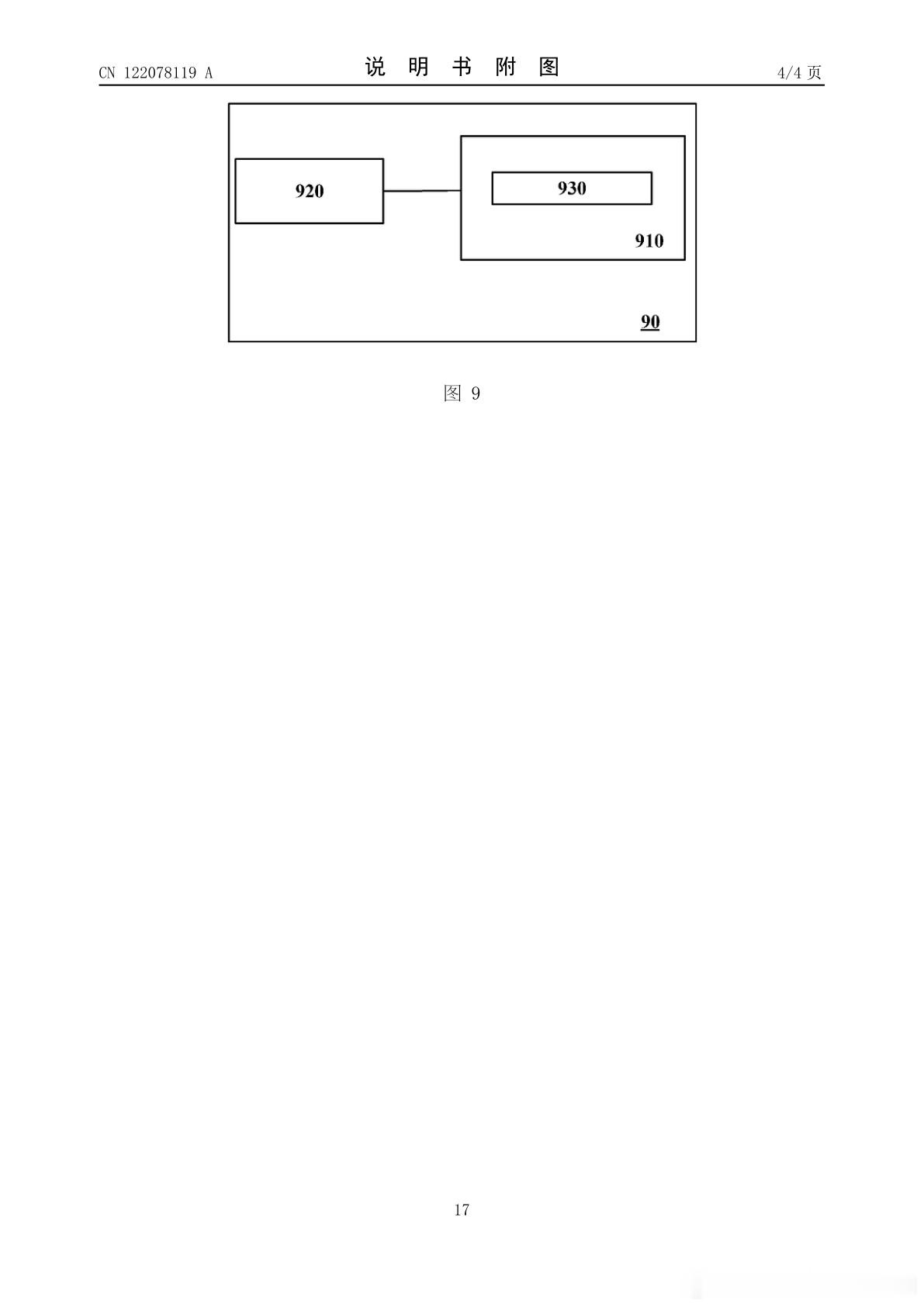
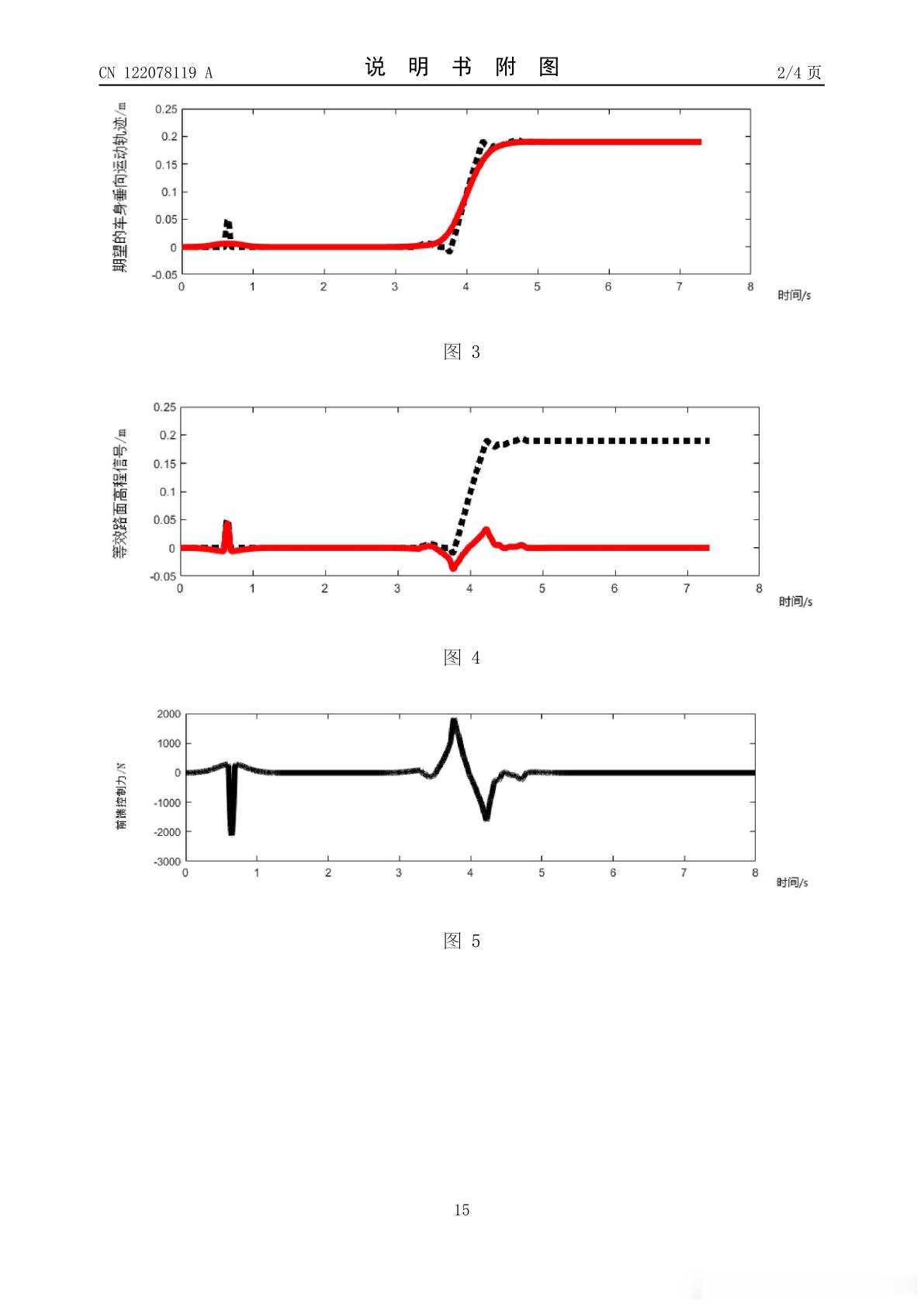
它先接收车辆前方道路的路面高程信息,然后对路面高程信息做滤波处理,得到期望的车身垂向运动轨迹。再根据路面高程信息和期望车身垂向运动轨迹,计算全主动悬架的前馈控制力。同时,系统还会检测车辆实际车身垂向运动状态,根据实际状态计算反馈控制力。最后把前馈控制力和反馈控制力叠加,得到总控制力,输出给全主动悬架执行器。
这套逻辑的关键,是前馈和反馈一起工作。
前馈是提前看路。车还没压上坑洼和起伏,系统已经根据前方路面高程算出该给悬架多少控制力。反馈则是兜住现实误差。因为路面识别不可能永远完美,车辆载荷、速度、轮胎、执行器响应也会变化,所以还要看实际车身垂向运动,再把偏差补回来。
专利里有一个挺重要的细节:对路面高程信息进行前向反向低通滤波,分离出低频分量,把无相位延迟的平滑信号作为期望车身垂向运动轨迹。它还可以根据驾乘模式、悬架行程硬件限制、识别到的路面类型来调节滤波频率。滤波频率越高,操稳性越强;滤波频率越低,舒适性越强。
这其实就是在说,悬架不是单纯追求“软”。
太软,车身可能晃;太硬,冲击又直接传进座舱。全主动悬架要处理的是车身姿态、轮胎贴地、悬架行程和乘坐舒适之间的取舍。专利里用路面高程和期望车身轨迹之间的差值,得到等效路面高程信号,再基于 1/4 车辆垂向动力学模型计算前馈控制力,就是在把这个取舍变成可计算的问题。
约束条件写得比较细。比如求解前馈控制力时,最优控制问题要同时考虑车身加速度项和悬架行程项,还要满足车辆垂向动力学约束、悬架行程范围约束、控制力输出范围约束。换句话说,悬架不能为了舒适无限补偿,也不能为了操稳把执行器推到极限。
反馈部分也是同一逻辑。系统可以根据实际车身垂向运动状态和期望状态之间的偏差计算反馈力,也可以采用天棚阻尼控制算法,根据车身垂向速度计算反馈力。它不是只预瞄,也不是只事后修正,而是用预判解决大方向,用反馈兜住现实偏差。
放到用户场景里,它对应的不是一句“底盘高级”,而是连续起伏路面上车身少晃一点,过坑洼时冲击少一点,运动模式下支撑更清楚,舒适模式下又不至于失控。