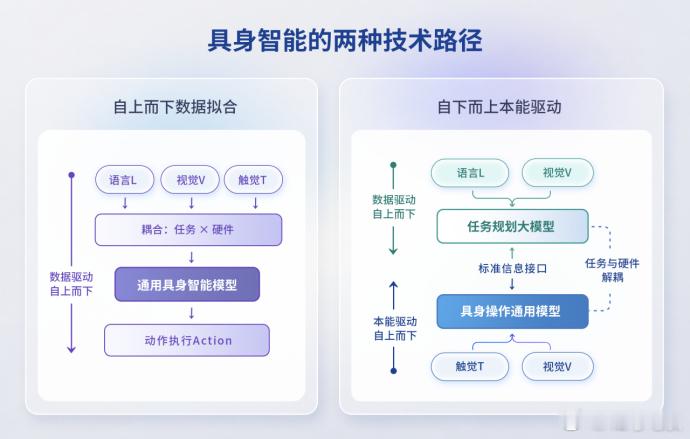
刚刚,橡木果机器人发布了「本能驱动」技术路线,即让机器人先获取操作本能,继而在与物理世界的交互中自主涌现操作智能。
具体来看,橡木果的技术路径是任务规划与操作执行解耦,自下而上构建通用操作模型。
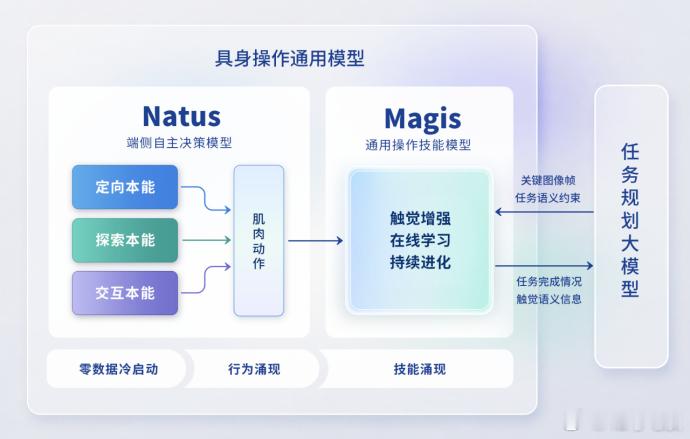
-- 任务规划层:负责知识推理、任务分解和全局规划。可通过自上而下的知识学习,其输出并非具体的电机电流指令或关节角度,而是关键图像帧和语义约束。
--操作执行层:负责将任务规划指令在真实物理世界中精准、鲁棒地执行。这是橡木果重点研究的层面,由具身本能出发,采用了自下而上、自主涌现操作智能的技术路线。
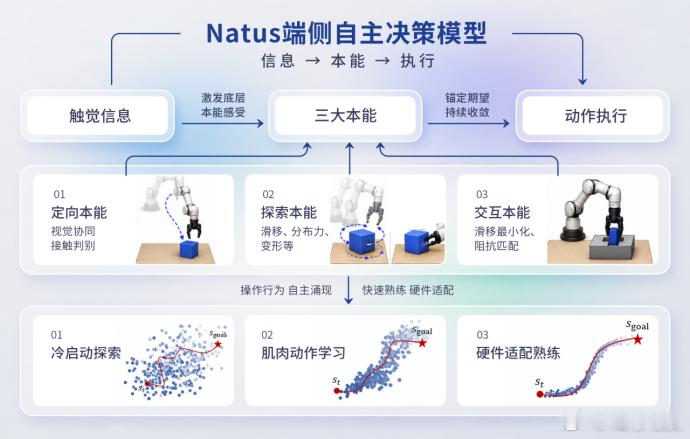
另外,橡木果构建了端侧自主决策模型 Natus,让机器人获得类人的操作本能,催生行为涌现。再依托真实物理世界中的探索与交互,不断熟练,最终构建第二个核心模型:通用操作技能模型 Magis,该模型的实现路径是利用 Natus 在真实物理世界中自主探索产生的、带有丰富精准触觉语义的数据,对视觉数据进行语义增强,然后训练技能模型。
具身智能机器人人形机器人