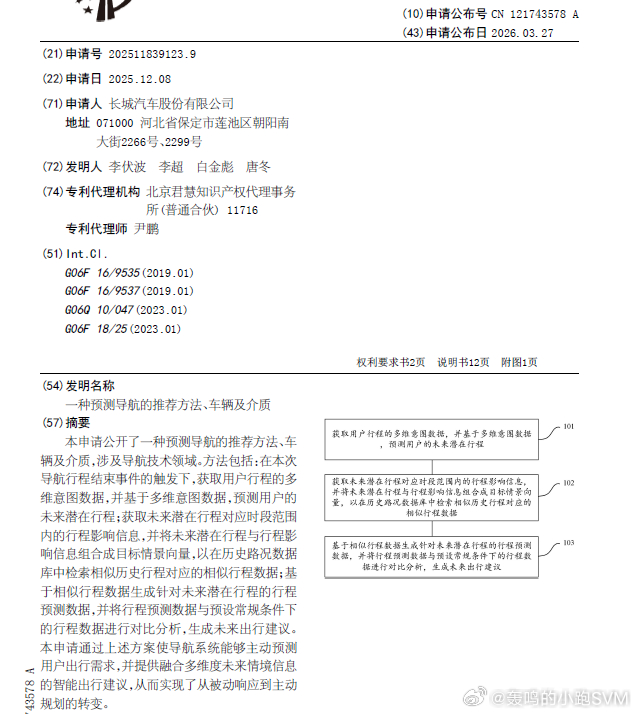
技术巡猎 长城汽车 一种预测导航的推荐方法、车辆及介质。导航的升级无非就是计算的时候更快、路径更准确、躲避拥堵更聪明一些?“路线计算”是一回事,但导航从什么时候开始工作,也是有意思的事情。现有的导航,大多是要等用户主动输入目的地才开始服务的,等一趟导航结束,系统也就沉默了。
长城想填上的,正是这段“两次出行之间”的空白,让导航从被动响应,往主动规划再走一步。它想做的不是一张更会算路的地图,而是一个更懂你节奏的出行助手。起点是很有意思的,不是在你出发前,而是在“本次导航结束”这个时刻触发下一轮判断。系统会去看两类信息:一类是你的历史通勤规律,比如工作日早上大概率从家去公司;另一类是你手机里的日历、日程事件,比如明天下午去机场,或者上午去某个园区开会。前者抓的是习惯,后者抓的是明确的安排。两类信息叠在一起,下一趟潜在行程就不再只是瞎猜,而是有了点“八九不离十”的味道。
也不在于“猜你去哪”,而是“猜你明天那趟路的情况”。它不只看目的地,也会继续往下补环境条件。天气预报、日期类型、公共事件、道路施工,都会被拉进来。工作日还是周末,下不下雨,有没有演唱会,路上有没有封路施工,都会跟路线信息、计划出发时段一起,封装成一个所谓的“目标情景向量”。其实就是给未来那趟路做一张完整画像。不是简单的“从A到B”,而是“工作日早高峰、下中雨、从A到B、附近还有施工”的那种复合场景。
这事为什么重要呢?因为现实里的堵车,从来不是单一因素造成的。平时半小时的通勤,碰上周一早高峰加中雨,味道就完全不一样;再叠加一个体育馆散场或者主干道施工,基本就进入“你以为能准点,结果呵呵”的状态。很多导航现在也会报实时路况,但它们更多是在你已经准备走了、甚至已经走在路上,才可以开始补救。这份专利的思路更为靠前,把未来情境拼起来了,再去历史数据库里找“像今天这种情况”的老样本。
系统会给不同维度设置权重,比如日期类型、天气、时间窗口、特殊事件这些因素,不是平起平坐,谁更重要谁权重大。然后把历史上那些类似场景逐个打分,筛出相似度够高的样本,再用加权方式算出这次未来行程的预测结果。最后得到的就不会是一句空泛的“明天可能有点堵”,而是更接近可执行的信息,比如预测通行时间、平均车速、拥堵指数。
它也没有停在“预测”这一步。系统会把预测结果跟一个常规条件下的基准情况做对比。也就是拿“正常天气、没有特殊事件”的路况当参照,看看明天到底会多花多少时间、拥堵会高多少。然后再把这些差值翻译成“要不要提前出门,要不要换一条路线,大概能省多少时间“。这个转换是非常关键的,普通用户根本不关心算法模型有多少维,他只关心明天是不是得早点起来。
专利也设计了一个交互闭环,系统可以通过弹窗和语音提醒把建议推给你,你可以选确认,也可以拒绝;如果你确认,目的地会被加密存在本地,等到你第二天启动车辆或者打开导航应用时,系统自动把导航拉起来。也就是说,它不是只给你发个提醒让你自己再操作一遍,而会把“预测---提醒---确认---执行”串成一条链。
提前帮你想好路径,还不错?