技术巡猎 小鹏汽车 增程发动机的点火角控制方法、装置、车辆及存储介质---很高兴,看到小鹏终于也有“发动机专利”了,这是我观察这么久以来的第一个。在这个专利里,小鹏实际上是在用“发电机管理”的思路管增程发动机。
点火角是比较细碎的事情,但直接决定两件事:油耗,以及增程介入时,车里的NVH情况。事实上增程的工作方式,天然“适合做细活”,因为增程器不直接驱动车轮,大部分时间是在几个高效工况点稳定发电,中间没有换挡、也不存在频繁降扭的情况,于是就给了控制策略足够长的“磨合时间”。
而在真实用车的场景里,比如城市通勤的时候,SOC掉到阈值以下,增程器启动以后,你最怕的其实不是“启动”本身,而是启动后的状态不够稳定:噪音的变化,偶尔还带一点共振,很多时候根源都指向点火角在爆震边界的来回摆,一会儿进角、一会儿退角,热效率和NVH都随着起伏。
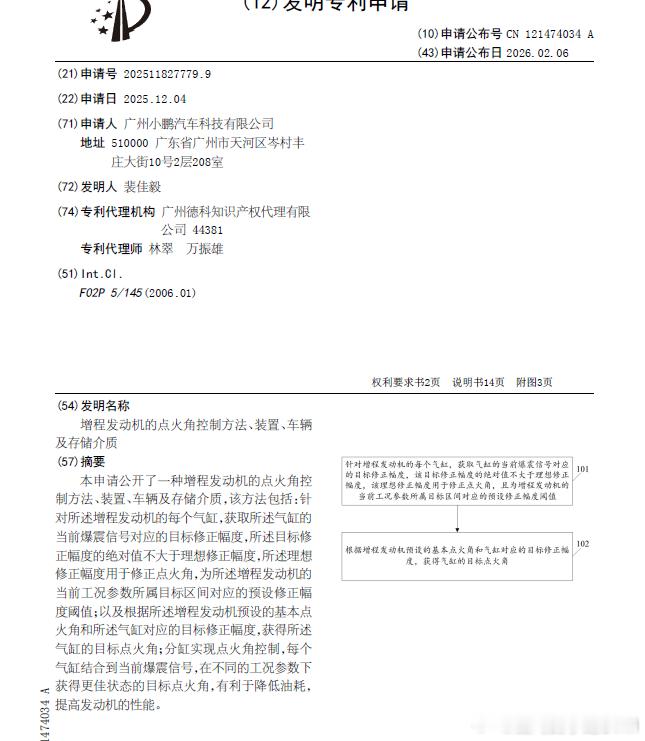
XP这里的切分方法是这样的:爆震信号先按气缸拆开,分缸去算“目标修正幅度”,再用“基本点火角 + 目标修正幅度 = 目标点火角”来控制每个气缸。传统的整机,是统一退角的,本质上是在让所有气缸为最差的那缸买单;而缸间差异又是客观存在的(温度、积碳、喷油一致性、传感器背景噪声),增程运行时间长了之后,这些差异会被放大。
分缸控制之后,就像每个缸各戴一只耳机,自己听自己有没有爆震,只调自己的点火角就行了,
一个比较“克制”的动态调整:按周期T一点点爬,不做那种“大幅度调整”。专利给了示例,预设周期可以是1s,角度调整率是0.1°/T。每过一个周期只允许修正一小步;而且“当前角度调整量”的继承关系也写得很清楚:车辆上电后的第一个周期从0开始,后续周期直接继承上一周期得到的目标修正幅度。控制只要是连续的,点火角就不容易跳变,声音和振动也更容易稳定。
爆震的闭环被分成三段:爆震信号低于第一阈值就主动进角;落在第一、第二阈值之间保持;达到或超过第二阈值就主动退角。对增程来说,这套“慢慢贴近边界”的闭环特别合适:效率能往上推的同时,也可以避免点火角变成锯齿波。
“最多能调整多少”在这也加了工况区间的天花板,叫理想修正幅度。当前工况参数落在哪个目标区间,就用那个区间预设的修正幅度阈值来限幅。闭环即使再积极,也不能越线,这一步对抗传感器误判、背景噪声干扰很有价值。
映射方式考虑的是转速×负荷做二维数组得到一阶角度幅度,EGR率、水温、进气温度分别做一维数组得到二阶/三阶/四阶角度幅度;最后从这些角度幅度里取最小值作为理想修正幅度,这里主要考虑的,是按最保守的那条约束来,边界会更稳定,而且计算复杂度也更为可控。
最后还有一层自学习,考虑慢变量。每个目标区间维护“自学习角度修正值”,目标修正幅度会进行叠加;更新方式用自学习比例(示例给了1%,4°会学出0.04°),还提到可用PID的积分思路把角度调整量积成学习值。再配合对中间角度调整量的限幅判断等约束。
整体上,我认为小鹏做增程并不只是“装一台发动机”而已,它至少在策略层面上,是期望把增程器做成一台可控的发电单元,过去几个月,我们看到的“超级增程”在这些细节里,多少可以看到影子。