技术巡猎 比亚迪 音频数据的处理方法、电子设备、车辆和介质。一个过去很容易被营销语言带偏的问题,重新拉回到了工程层面:车里的声音,不能只靠“喇叭数量”和“功率大小”堆出来,关键要看系统有没有能力判断声音应该从哪里来、往哪里去、怎么在车厢里站住位置。
很多人理解车载音响,第一反应还是“多少个扬声器”“多少瓦”“有没有头枕音响”。这些当然重要,但它们更像执行机构。就像底盘有再多电控减振器,如果控制算法不知道路面状态、不知道车身姿态,也只是硬件堆在那里。音响也是一样,喇叭多只是给系统更多发声点,真正难的是:系统要知道人声在中间,鼓点在后方,环境声在周围,雨声、风声、电影里的空间声不能全部糊成一团。
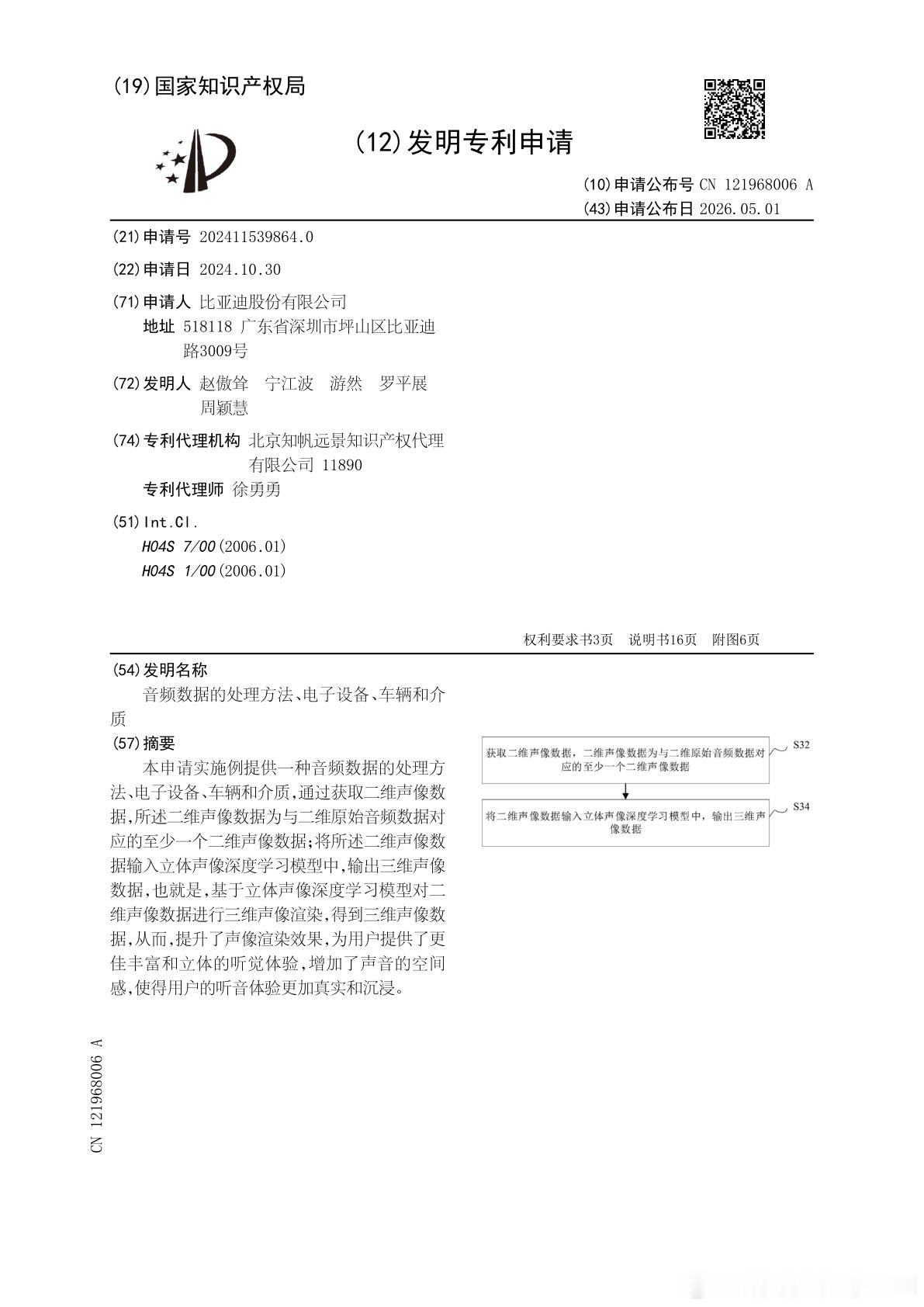
这份专利的思路,就是先解决“声像定位”问题。
所谓二维声像,可以简单理解成声音在一个平面里的位置。比如一个声音在你左前方,离你大概多远,角度是多少。专利里用距离R和方位角θ来描述二维声像。三维声像则进一步增加了俯仰角,也就是声音不光有左右、前后,还要有上下。这个差别在车里特别关键,因为车厢不是一个理想听音室。挡风玻璃、顶棚、座椅、门板、中控台都会反射和吸收声音,副驾听到的空间感,和后排听到的空间感也不一样。
所以,比亚迪这里没有简单说“我用模型直接把二维变三维”,它中间加了一个很工程化的东西:环境声场脉冲响应数据库。
这个东西可以理解成给车内空间做一套“声音地图”。系统会在车内声场覆盖区域里采集脉冲响应,再计算双耳时间差ITD和双耳声级差ILD。ITD就是声音到达左右耳的时间差,比如声音从左边来,左耳会更早接收到。ILD就是左右耳接收到的声音强弱差,比如声音更靠左,左耳听到的能量通常更高。人耳判断声音方向,很多时候靠的就是这些微小差异。
但车里麻烦的地方在于,这些差异会被车内结构放大、削弱甚至扭曲。一个声音从中控台附近发出来,经过挡风玻璃反射后,可能会让人觉得它位置更高;一个低频从门板低处出来,经过车厢驻波影响,也可能让定位变得模糊。所以车载音响调校长期是个很吃经验的活,不是拿家庭影院那套逻辑直接搬进车里就行。
专利里的数据库价值就在这里:先把不同位置声源对应的ITD、ILD和二维声像关系记录下来。以后遇到一段普通立体声音频,系统先分离出里面的声像对象,再根据左右声道信号计算时间差和声级差,到数据库里匹配它大概对应车内哪个位置。这个过程听起来像算法,其实本质是“先让车认识自己的声场”。
再往后,就是深度学习模型上场。
立体声像深度学习模型可以基于立体声版本数据样本预训练。训练时,把立体声版本数据样本输入模型,模型生成预测三维声像数据,再拿它和目标三维声像数据对比,通过损失函数不断更新,直到模型收敛。目标三维声像数据可以来自多通道版本数据样本,并且包含俯仰角。换句话说,系统相当于拿高规格的三维/多通道音源当老师,让模型学习:普通双声道内容,应该怎样被扩展成适合车内播放的三维声场。
这一步的现实意义很大。
因为用户每天听的东西,大部分并不是为车载多扬声器系统专门制作的。音乐软件里的歌、短视频里的声音、播客、普通电影音轨,很多都是双声道内容。如果车里只有硬件,没有内容重构能力,那再多扬声器也只能把普通音频放大播放。听感会更响、更满,但不一定更准、更立体。
而这套方案试图做的是:把普通内容拆开、定位、再分配。人声可以更稳定地固定在前方中心,乐器可以有更清晰的横向展开,电影里的环境声可以被推到车厢周围甚至上方,游戏或影音场景里的空间变化也会更自然。用户未必会说出什么叫ITD、ILD、俯仰角,但他能感受到一个差异:声音不再是一堵墙压过来,而是在车里有层次、有方向、有距离。
当然,这里也要说边界。
专利写的是方法和系统框架,不等于它已经在某款车上实现了完美效果。真正落地还要看几件事:声像分离,环境声场数据库覆盖的细致度,模型对不同音乐类型的泛化能力,不同座位之间听感是否一致,实时计算会不会引入延迟,以及车辆量产后不同内饰材料、座椅布局、玻璃面积变化会不会影响声场结果。
尤其车内空间很小,声波反射路径短,驾驶员、副驾、后排乘客的位置差异又很大。好的车载音频算法,最后一定要和整车声学工程、座舱布置、扬声器布局、NVH设计一起考虑。
所以,这份专利看着像音频算法,背后其实还是座舱智能化的逻辑。