机器人学习教程
机器人学习正处于一个重要转折点,传统的基于动力学的模型方法正逐渐被数据驱动、学习驱动的范式取代,推动自主系统能力的前所未有提升。本教程全面梳理了现代机器人学习的关键技术路线,从强化学习(RL)、行为克隆(BC)到具备多任务和多机器人适应能力的通用语言条件模型,配合开源库lerobot的实战代码,助力研究者和实践者掌握核心理念与技能。
核心内容概览:
1️⃣ 传统机器人学基础:介绍刚体动力学、运动规划、反馈控制及其局限,强调传统模型对复杂动态和多任务通用性的不足。
2️⃣ 机器人强化学习:详述强化学习在机器人中的应用,涵盖Markov决策过程、样本效率提升(如HIL-SERL算法)、现实世界训练挑战及解决方案。
3️⃣ 机器人模仿学习:通过行为克隆学习专家示范,避免高风险探索和奖励设计难题,介绍变分自编码器(VAE)、扩散模型(Diffusion Models)和流匹配(Flow Matching)等生成模型在多模态数据中的优势。
4️⃣ 通用机器人策略:介绍基于大规模、多任务、多机器人数据训练的基础模型(Foundation Models),如π_0和SmolVLA,利用视觉-语言模型(VLM)与动作专家(Action Expert)结合,实现跨任务、跨平台的高效泛化。
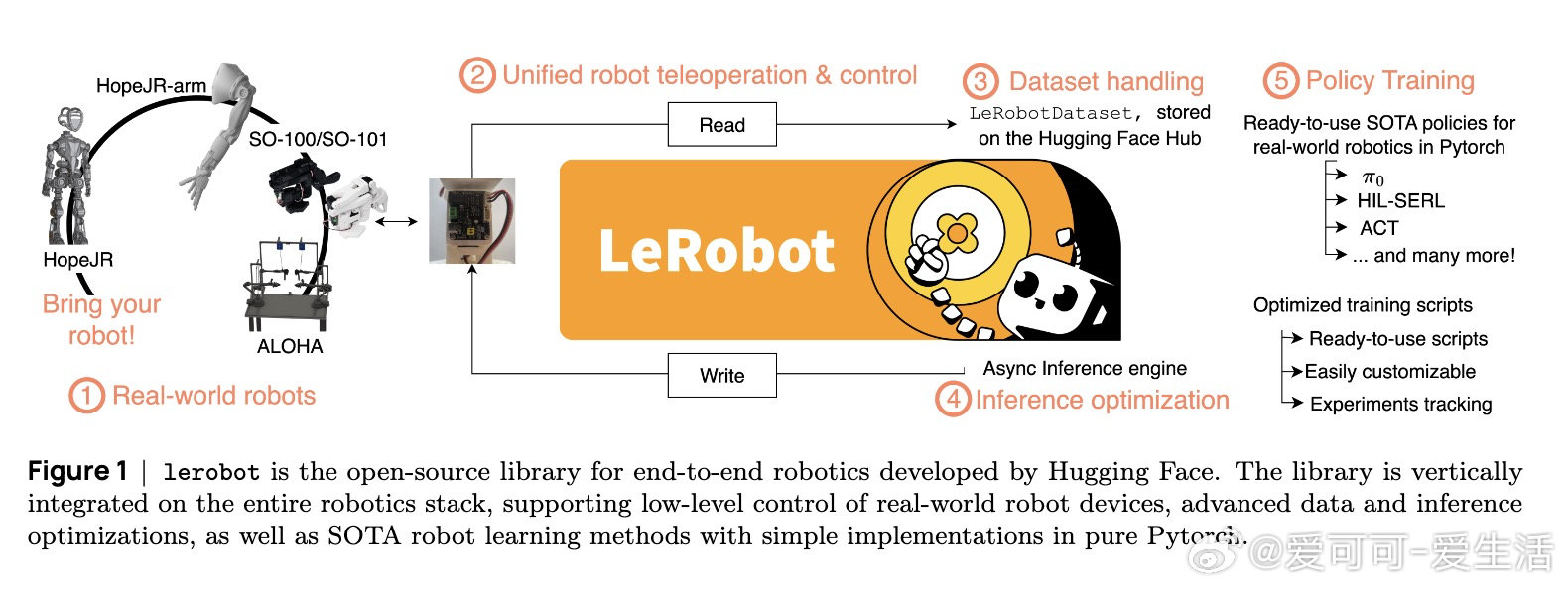
开源工具lerobot特色:
- 标准化的机器人多模态时序数据集格式LeRobotDataset,实现统一高效数据访问与共享。
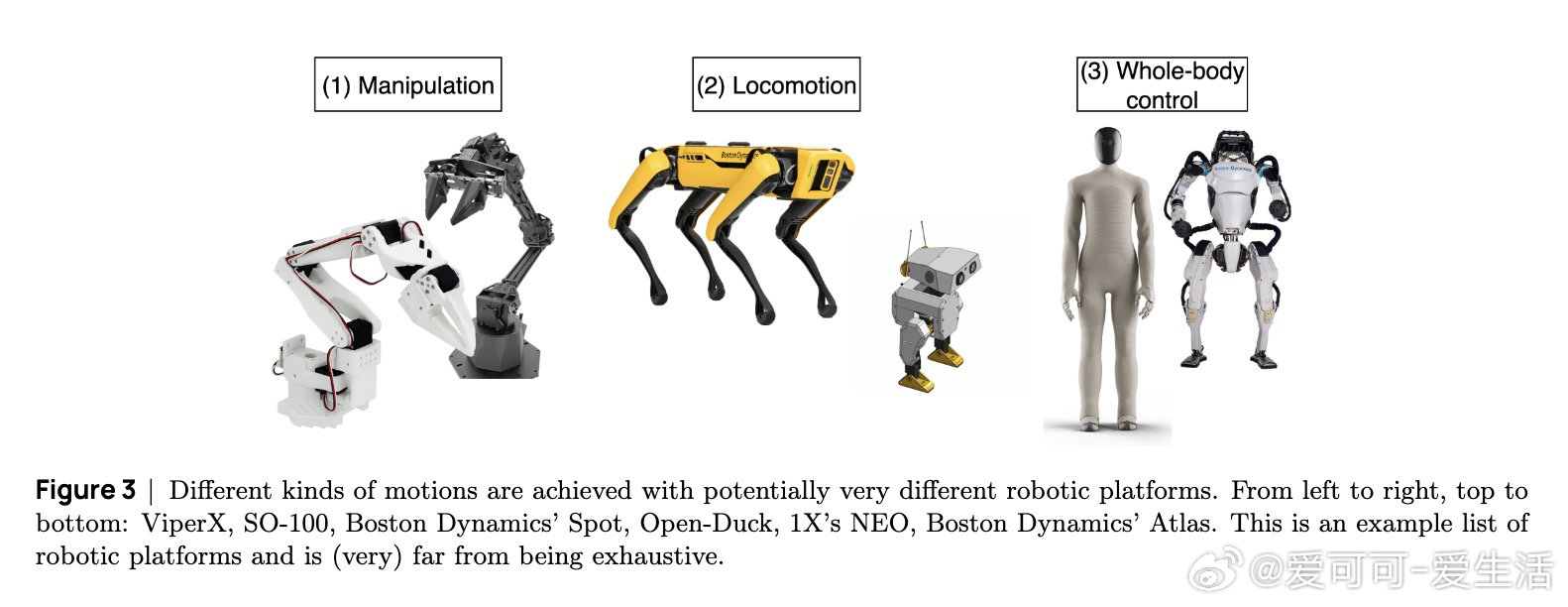
- 支持多种机器人平台与控制类型。
- 集成多种最先进算法(RL、BC、Diffusion Policy、ACT等)及优化推理机制(异步推理),方便快速实验和部署。
- 丰富的实用代码示例,从数据采集、训练到推理全流程覆盖。
现代机器人学习趋势:
- 从模块化传统控制到端到端感知-动作学习。
- 利用大型多模态、跨任务数据驱动模型,突破单任务局限。
- 结合语言理解,实现自然语言指导的多任务机器人操作。
- 开放数据与开源软件推动社区协作和技术民主化。
本教程不仅系统串联了机器人学习的理论与实践,还强调了开放、协作在推动领域进步中的核心作用。无论是初学者还是经验丰富的研究者,都能从中获得启发和实用工具,参与到未来机器人自主智能的建设中。
详情:arxiv.org/abs/2510.12403
![天呐这也太尴尬了……完全自爆了数据平台就是她们自己运营的,机器人实锤[笑着哭]](http://image.uczzd.cn/15367690489191037677.jpg?id=0)